En juin 2019, j’ai découvert l’apiculture grâce à un voisin apiculteur amateur passionné depuis 40 ans.
Après un été 2019 studieux à lire « l’apiculture pour les nuls » et à regarder l’ensemble des épisodes de « Les maîtres des abeilles » en famille, nous voilà prêts !
La découverte de l’apiculture
Je réserve deux ruches et deux essaims pour Mars 2020. En attendant, je prépare une dalle béton pour accueillir une ruche au potager et l’autre dans mon jardin de ville.
En plein confinement, je suis appelé par la route d’or pour prendre rendez-vous. Une semaine plus tard, c’est fait. Après un voyage unique avec mon laisser-passer d’apiculteur, me voici doté de deux ruches !
Pour simplifier la mise en place, nous avons placé les deux ruches sur un toit-terrasse ensoleillé toute la journée… et sous notre regard.





Deux semaines après, première visite avec mon coach, histoire de faire connaissance avec les dizaines de milliers de locataires.


Le courant est bien passé 😉
Comme je l’ai fait pour le potager et pour le poulailler, je me suis lancé le défi de connecter les ruches !
Le cahier des charges est le suivant :
- monitorer le poids des ruches, on peut déduire une quantité d’informations des variations de poids des ruches.
- pouvoir prendre une photo de l’activité des abeilles sur la planche d’envol, à la demande ou sur un événement donné.
- pouvoir détecter une attaque de frelon et cerise sur le gâteau, les terrasser… (à l’heure où j’écris cet article, ces deux fonctionnalités sont encore de l’ordre du rêve…)
Conception d’une balance de ruche
J’ai lu pas mal d’articles et de technologies sur les balances. Il existe 4 façons de placer des capteurs de poids.
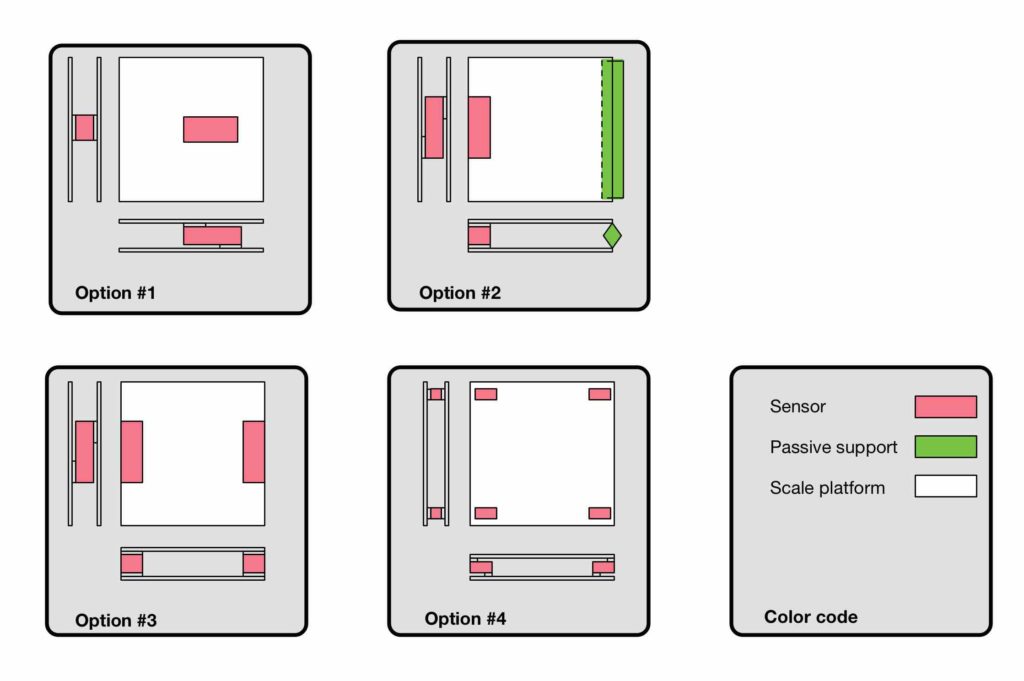
Je suis parti sur l’option 1, un capteur central unique. Comme l’indique le comparateur, ce n’est pas la solution la plus stable mécaniquement, la prochaine fois que je fais une balance, je partirai sur l’option 4 qui est plus stable et a en plus l’avantage de ne pas avoir besoin de structure.
Réalisation des deux plateaux en inox
Le principe de la balance réside dans le fait que le poids présent sur le capteur modifie de façon infime le courant qui passe par ses bornes. A l’aide d’un amplificateur, le Raspberry Pi enregistre clairement des modifications de poids.



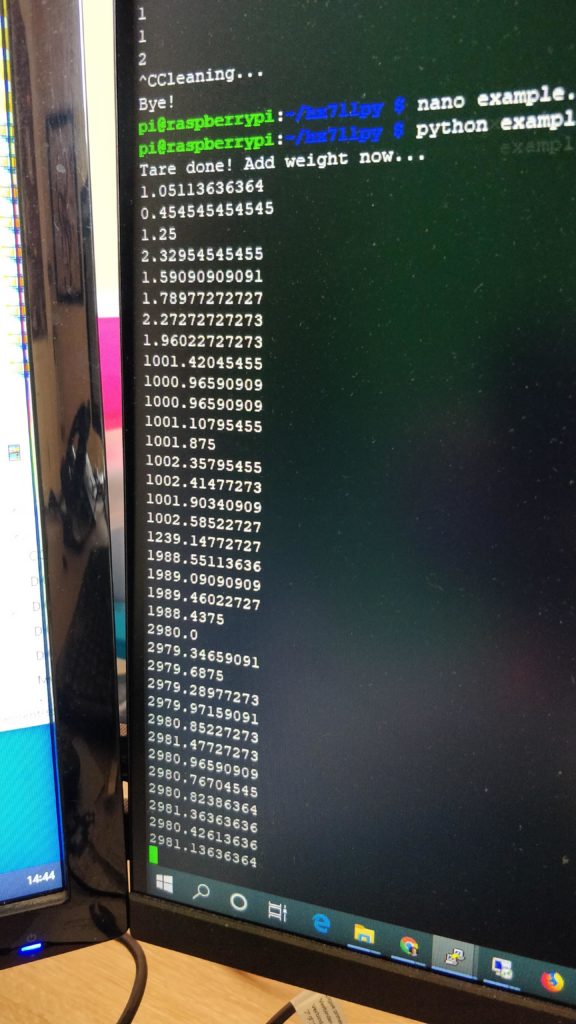
Test et étalonnage à l’aide de trois paquets de 1Kg
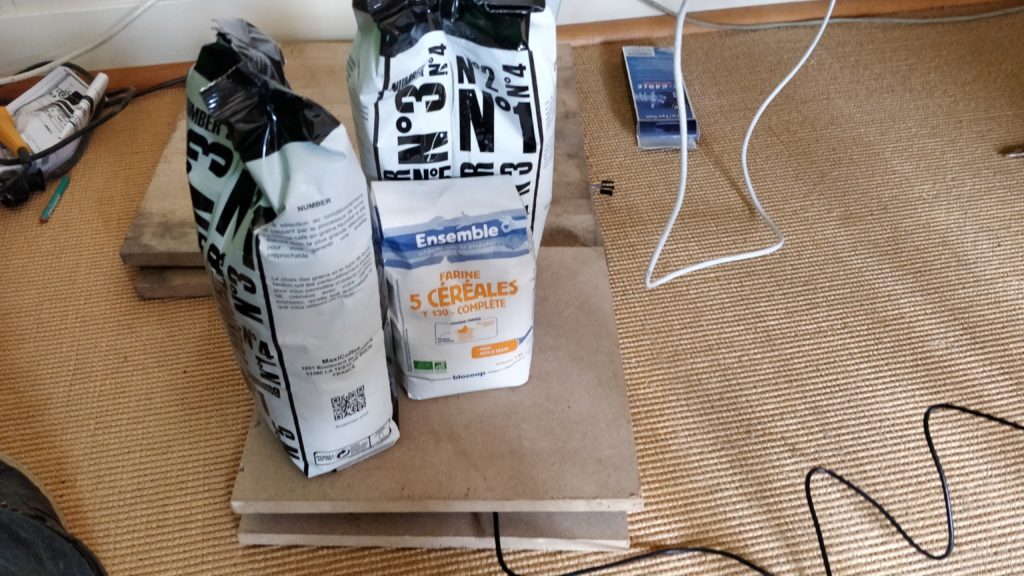
Résultat en live : 1 000g puis 2 000g, puis 3 000g : pas mal !
Et hop, voici mes deux ruches équipées d’une balance.

Les deux balances sont raccordées à un Raspberry Pi 3 équipé de Domoticz.

Voici le type de données que l’on peut collecter sur 7 jours.
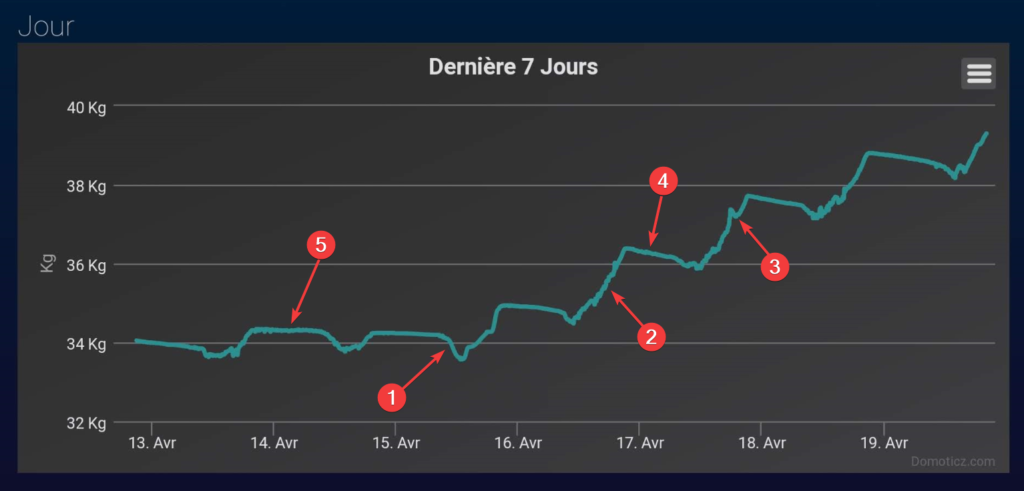
Notre analyse :
- sortie du matin, dès les premiers rayons du soleil
- récolte abondante (quasi 2Kg) sur une journée incroyable après plusieurs jours humides
- soleil d’artifice : c’est le nom donné à cette période propice au premier vol des nouvelles abeilles (1 000 nouvelles chaque jour). Elles choisissent le meilleur moment pour tester leurs ailes : beau temps sans vent… Le lendemain, il est apparu plus tôt
- typique d’une nuit après une grosse journée de récolte. Toute la nuit, les abeilles ventilent (elles se mettent sur la planche d’envol, mais à l’envers et battent des ailes pour former un courant d’air) afin de baisser le niveau d’humidité du miel. Le taux d’humidité doit descendre à 19% pour que le miel puisse se conserver. A ce moment, les abeilles operculent les alvéoles. La ventilation fait descendre le taux d’humidité ; il y a perte d’eau donc de poids.
- cette nuit là, les abeilles ont plutôt construit des alvéoles en cire à partir du miel : il faut 9Kg de miel pour faire 1Kg de cire. Pas besoin de ventiler, le poids reste stable.
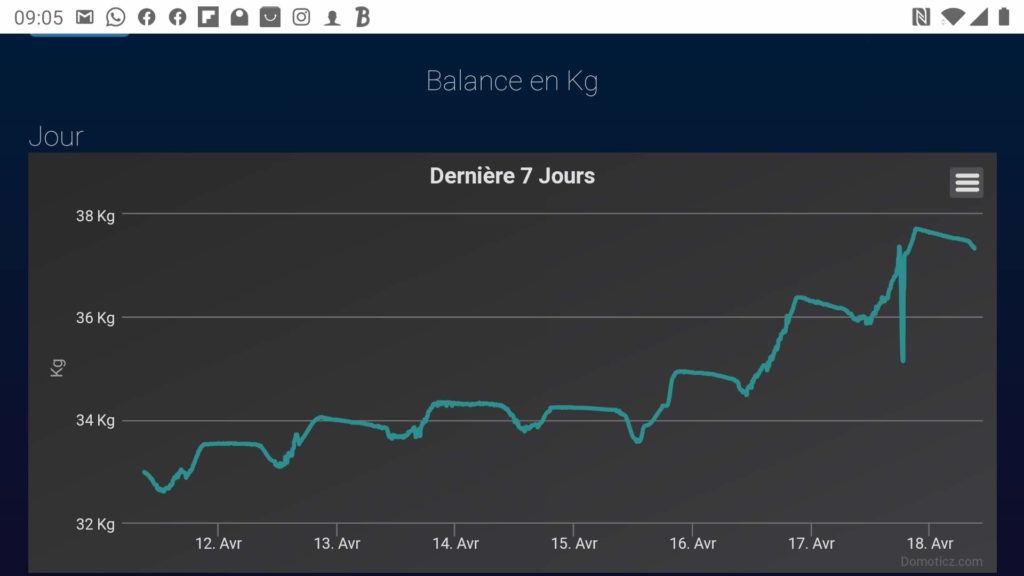
Zoom sur une journée et deux nuits :

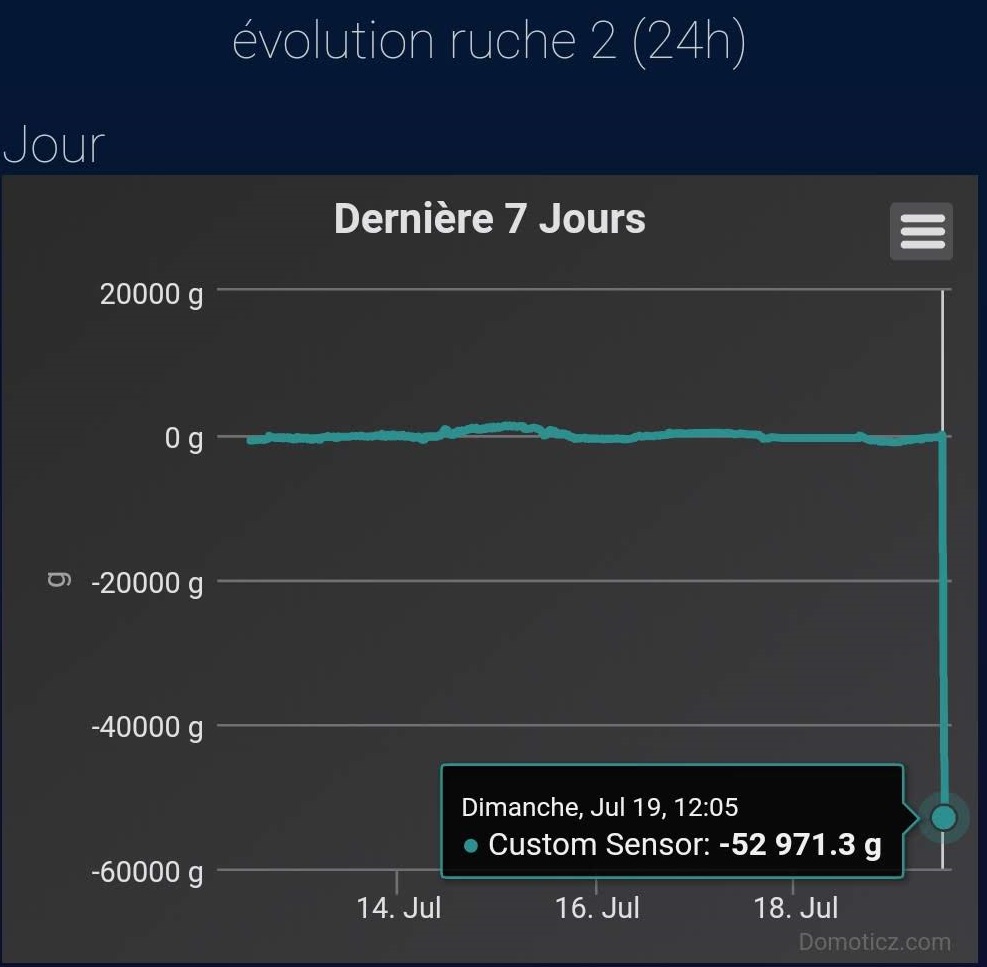
Une baisse brutale de poids peut aussi s’expliquer par un essaimage. C’est à dire 20 000 abeilles qui quittent la ruche avec la reine. Une telle masse d’abeilles représente un poids de 2Kg (une abeille fait 0,1g). J’ai mis en place une alerte pushbullet pour alerter d’un essaimage, ce qui me permet de récupérer un essaim qui se serait réfugié dans un arbre près des ruches. Je n’ai pas pu valider, puisque je n’ai pas eu d’essaimage… ce sera pour l’année prochaine !
[Mise à jour une année après] J’ai pu valider l’alerte essaimage ! J’ai rédigé un article dédié !
Voici ce à quoi aurait pu ressembler un essaimage sur la balance, mais dans mon cas, c’était plus un bug de la balance ou alors une petite sortie (puis retour) inexpliquée de 20 000 abeilles !
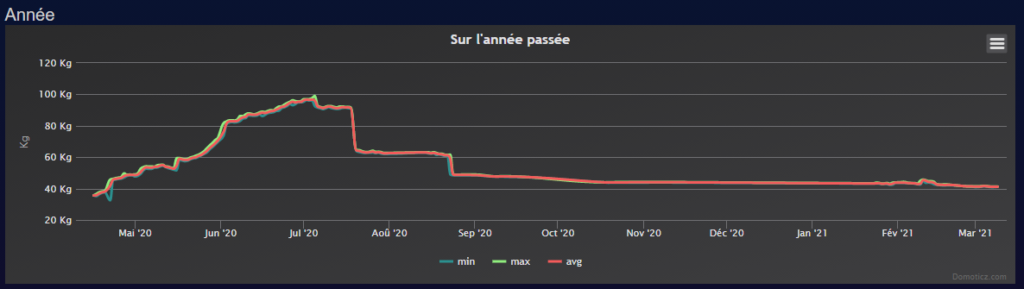
Courbe de poids sur une année, de mars à mars
Timelapse de la récolte


Domoticz permet aussi d’amasser des métriques métrologiques sur les services météo open, comme openweather. On peut utiliser ces datas via l’API de domoticz.
Exemple pour le vent :
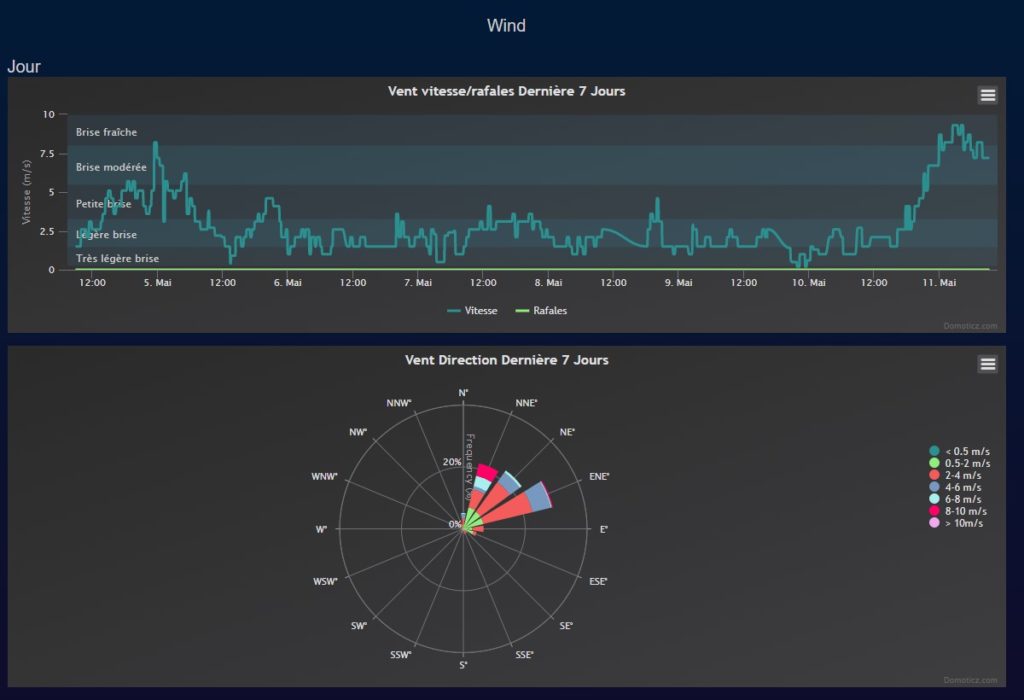
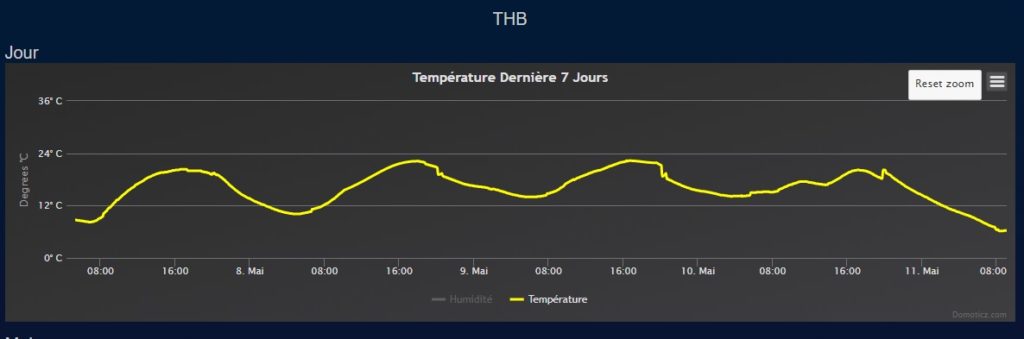
La température est aussi disponible. J’ai aussi ajouté une sonde de température au cœur du couvain pour monitorer sa température.
On observe que le couvain reste à la même température, jour comme nuit alors que la température extérieure varie. Une alerte est configurable dans Domoticz pour être alerté d’une baisse de température dans le couvain, qui correspondrait à un vrai problème pour la colonie.

Maintenant de la récolte est passée, attaquons nous au problème des frelons !
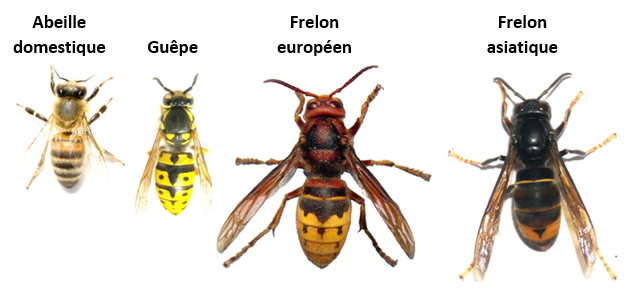
Détection des frelons
Les frelons, asiatiques surtout, attaquent les abeilles à partir de mi juillet, le rythme des attaques s’intensifiant jusqu’à mi novembre.
L’objectif est de trouver une solution à la fois fiable et abordable pour détecter et tuer les frelons qui attaquent les ruches.
Nous allons tester deux approches :
– par le son
– par l’image
En attendant, on améliore notre revers de badminton en pulvérisant les frelons asiatiques qui attaquent mes ruches !
Approche par l’image
La fondation Raspberry Pi a lancé une caméra HQ pour Haute Qualité. Cette caméra fonctionne avec des objectifs.

J’en ai un exemplaire, j’ai profité des vacances d’été pour avancer sur ce projet.
J’ai placé cette caméra au dessus de la ruche, dirigée vers le bas, pour prendre en photo devant la planche d’envol, car les frelons en vol stationnaire sont toujours dans la zone.

En attendant une solution à base d’IA / Deep learning, je me suis attaqué à l’acquisition d’image :


Puis au traitement sur la base d’un nombre de pixels contiguës orangés caractéristiques des frelons asiatiques à l’aide de la librairie OpenCV. Des articles comme celui ci : https://answers.opencv.org/question/74444/detect-flying-hornets/ m’ont donné de l’espoir.
Les résultats sont intéressants :
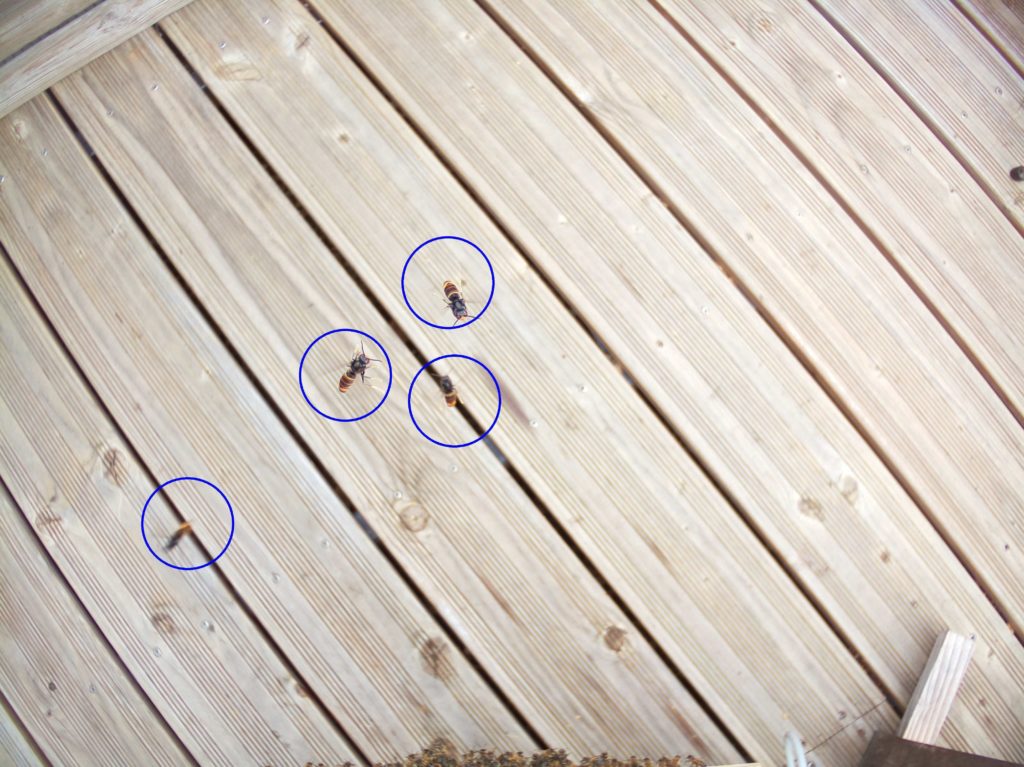
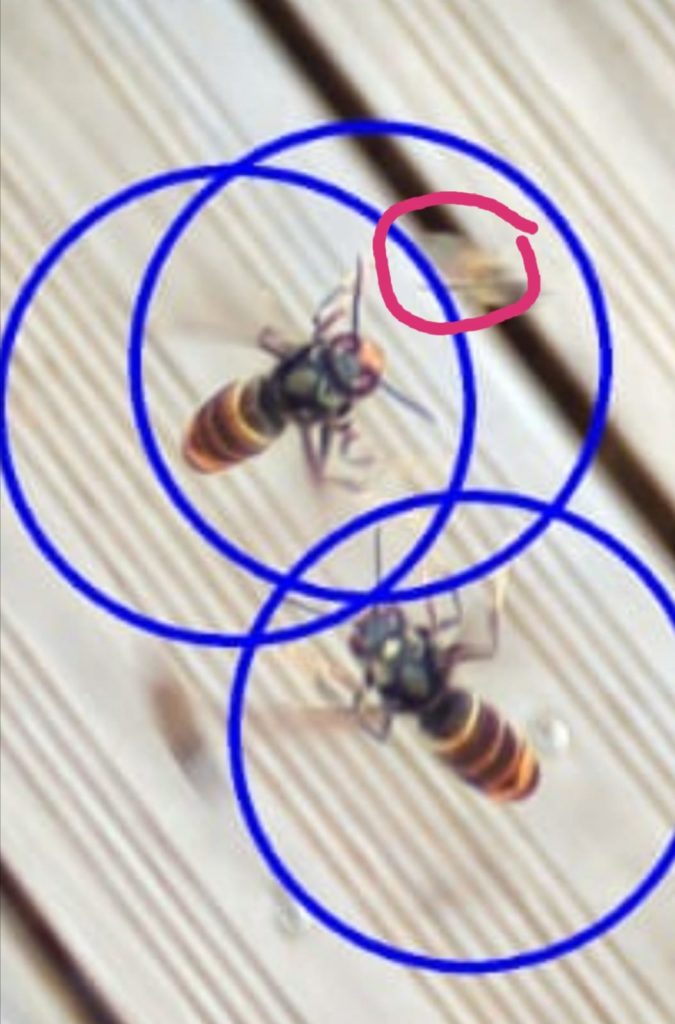


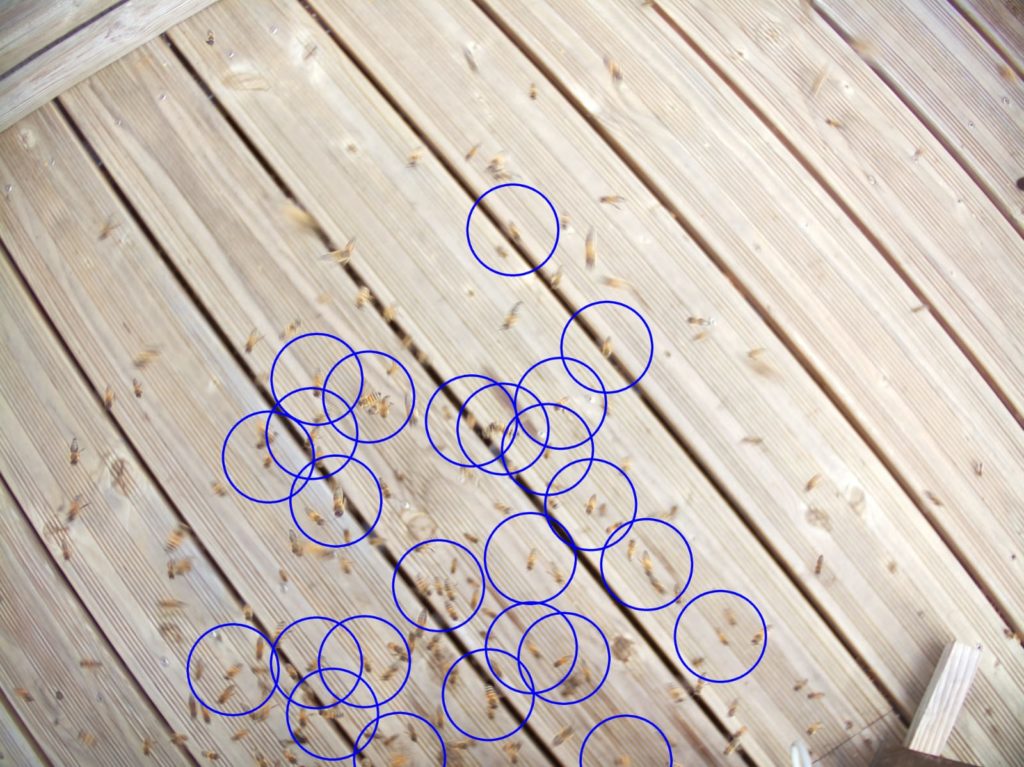
Vous l’avez compris, soit il faut que j’améliore mon algorithme de détection OpenCV, soit il faut que je passe au deep learning (qui est fait pour ça !).
Par exemple, l’API de Google n’est pas opérationnelle !

Une façon d’avancer plus rapidement serait de tomber sur un modèle déjà existant comme https://hackaday.io/project/161581-ai-equiped-wasp-and-asian-hornet-sentry-gun et https://www.kaggle.com/tegwyntwmffat/european-wasp-vespula-vulgaris-kitti-format, mais il ne fonctionne pas avec mon système.
Une fois détecté, on passera à l’action. J’ai plein d’idées, mais c’est pour après. D’ailleurs, la détection par l’image a ma préférence parce qu’elle est limitée dans l’espace (pas de risque de photographier un 747 entre la ruche et le sol) et en plus, une fois localisé en vol stationnaire, on a une idée de où il faut agir, à la différence du son.